
- Cable utilizado
- Instrucciones de verificación
- Oscilografía de K-CAN, PT-CAN, F-CAN
- Orden de medición de resistencia con resistencia coincidente K-CAN, PT-CAN y F-CAN
- K-CAN
- PT-CAN, F-CAN
- Nota!
- El bus CAN no funciona
Este manual se utiliza para verificar que la señal de alto nivel de CAN y el bajo nivel de señal de CAN se transmiten correctamente a la conexión de bus.
Cable utilizado
Cable multifuncional
Instrucciones de verificación
- Prueba de voltaje (osciloscopio): para verificar el voltaje, la batería debe estar conectada y el encendido conectado.
- Medición de resistencia: Al medir la resistencia, es necesario que el objeto a medir se desenergice antes de la medición. Para hacer esto, la batería está desconectada. Espere 3 minutos para que se descarguen todos los condensadores del sistema.
Información CAN
El bus CAN (Controller Area Network) es un sistema de bus serie con las siguientes características:
- La propagación de la señal ocurre en ambas direcciones.
- Cada mensaje es recibido por todos los suscriptores del bus. Cada abonado del autobús decide si usará el mensaje,
- Se agregan suscriptores de bus adicionales mediante una conexión paralela simple.
- El sistema de bus forma un sistema con un conductor. Cada suscriptor del bus puede ser un conductor o un actuador, dependiendo de si está conectado como transmisor o receptor.
- Se utiliza una conexión de dos cables como medio de transmisión. Designaciones de cables: CAN bajo y CAN alto.
- Como regla general, cada suscriptor de bus puede comunicarse vía bus con todos los demás suscriptores de bus. El intercambio de datos en el autobús se rige por las reglas de acceso. La principal diferencia entre el bus de datos K-CAN (bus CAN del cuerpo), el bus PT-CAN (bus CAN del motor y la transmisión) y el bus F-CAN (bus CAN del chasis) es:
- K-CAN: velocidad de transferencia de datos aprox. 100 Kbps Solo cable posible.
- PT-CAN: velocidad de transferencia de datos aprox. 500 Kbps El modo de un solo cable no es posible.
- F-CAN: velocidad de transferencia de datos aprox. 500 Kbps El modo de un solo cable no es posible.
Controlador: el controlador es un socio de comunicación activo del que se origina la iniciativa de comunicación. El conductor tiene prioridad y controla la comunicación. Puede enviar mensajes al suscriptor del bus pasivo (actuador) a través del sistema de bus y, a pedido, recibir sus mensajes.
Actuador: el actuador es un miembro pasivo de comunicación. Recibe un comando para recibir y transmitir datos.
Sistema con dispositivo maestro: en un sistema con un dispositivo maestro, los participantes de la comunicación pueden, en cierto momento, asumir el papel de maestro o actuador.
Oscilografía de K-CAN, PT-CAN, F-CAN
Para mayor claridad, si el bus CAN funciona sin problemas, debe mirar la comunicación del bus. Al mismo tiempo, no es necesario analizar bits individuales, y solo debe asegurarse de que el bus CAN funcione. La oscilografía muestra: "El bus CAN obviamente funciona sin molestias".
Al medir con un osciloscopio de voltaje, un cable y tierra de bajo nivel CAN (o CAN-High alto) reciben una señal de onda cuadrada dentro del rango de voltaje:
K-CAN:
Nivel CAN bajo en relación con la masa: U min = 1 V y U max = 5 V
Nivel CAN alto en relación con la masa: U min = 0 V y U max = 4 V
Estos valores son aproximados y pueden variar, dependiendo de la carga del bus, hasta en 100 mV.
Configuración del osciloscopio para medir en el K-CAN:
CH1: Sonda 1, Rango 2 B / div; Conexión DC DC2: Sonda 2, Grado 2 V / div; Tiempo de conexión DC: 50 ms / div
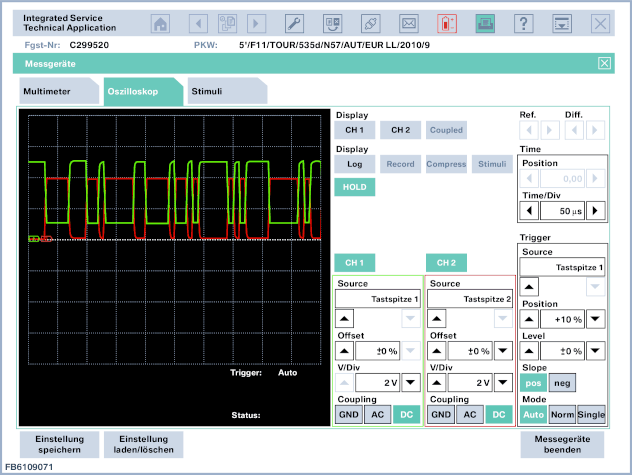
Fig. 1: Medición K-CAN: CH1 bajo nivel de CAN, CH2 alto nivel de CAN
Al medir con un osciloscopio de voltaje, un cable y tierra de bajo nivel CAN (o CAN-High alto) reciben una señal de onda cuadrada dentro del rango de voltaje:
PT-CAN y F-CAN
Nivel CAN bajo en relación con la masa: U min = 1.5 V y U max = 2.5 V
Nivel CAN alto en relación con la masa: U min = 2.5 V y U max = 3.5 V
Estos valores son aproximados y pueden variar, dependiendo de la carga del bus, hasta en 100 mV.
Configuración del osciloscopio para la medición PT-CAN (o F-CAN):
CH1: Sonda 1, Rango 1 B / div; Conexión DC DC2: Sonda 2, Grado 1 V / div; Tiempo de conexión DC: 10 ms / div 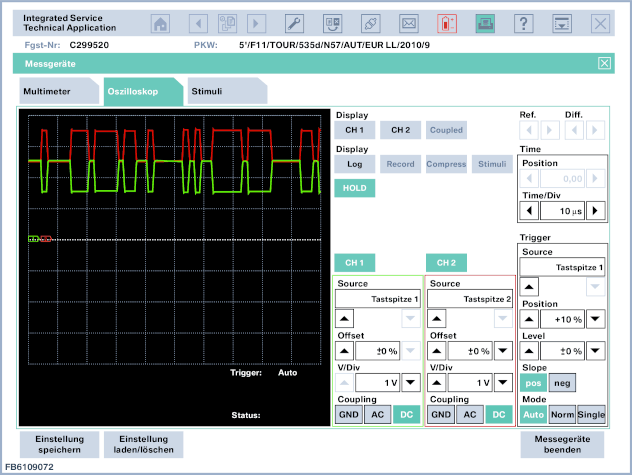
Figura 2: Medición de PT-CAN: CH1 CAN bajo, CH2 CAN alto
Orden de medición de resistencia con resistencia coincidente K-CAN, PT-CAN y F-CAN
El proceso de verificación de la medición de resistencia:
- El bus CAN debe estar desenergizado
- No se deben conectar otros dispositivos de medición (conexión paralela de dispositivos de medición)
- La medición se realiza entre los cables CAN de bajo nivel y CAN de alto nivel.
- Los valores reales pueden diferir de los valores especificados en varios ohmios.
K-CAN
No se puede realizar una medición de resistencia separada en el bus K-CAN, ya que la resistencia varía según la lógica de conmutación de la computadora.
PT-CAN, F-CAN
Para evitar el reflejo de la señal, dos suscriptores del bus CAN (con la distancia máxima en la red PT-CAN) se cargan con una resistencia de 120 ohmios. Ambas resistencias de carga están conectadas en paralelo y forman una resistencia equivalente de 60 ohmios. Con la tensión de alimentación desconectada, esta resistencia equivalente se puede medir entre las líneas de datos. Además, las resistencias individuales se pueden medir individualmente.
Instrucciones de medición con una resistencia de 60 ohmios: desconecte una computadora fácilmente accesible del neumático. Mida la resistencia en el conector entre los cables CAN bajo y alto.
Nota!
No todos los automóviles tienen resistencia de terminación en el bus CAN. La presencia de la resistencia de terminación incorporada en el automóvil conectado se puede verificar utilizando el circuito eléctrico apropiado.
El bus CAN no funciona
Si el bus de datos K-CAN o PT-CAN no funciona, puede haber un cortocircuito o un cable CAN alto o bajo roto. O ECU defectuoso.
Para localizar la causa de la falla, se recomienda proceder de la siguiente manera:
- Desconecte los suscriptores del bus CAN a su vez hasta que se encuentre un bloqueo que sea la causa del mal funcionamiento (= ECU X).
- Verifique los cables a la computadora X por cortocircuito o circuito abierto.
- Si es posible, verifique la ECU X.
- Dicha secuencia de acciones conduce al éxito solo si el cortocircuito tiene un cable verificable desde la computadora al bus CAN. Si el cable en el bus CAN tiene un cortocircuito, entonces debe verificar el mazo de cables.
Nos reservamos el derecho a errores tipográficos, errores semánticos y cambios técnicos.